Did some physics first, got 12/15 on f=ma 2019a (first 15), not bad. I’m not as washed as I thought I was…
Anyway today went….. interestingly. I really don’t remember what happened in the beginning tho.
Some shooter testing with the new hub. Looks like backspin won’t matter significantly, although AG is keeping the back roller. Not enough tests to satisfy me but not enough manpower to run them anyway.
I had KL (i <3 KL he’s the only one who can do things) build a 118-style indexer. But progress has been necessarily slower since he’s literally soloing it (nobody else is useful). I had CET start like last thursday or wednesday, but clearly not that much has been done (or done successfully).
anyway while all that is being done I go thru with design. I insist $O(n^3)$ times on inverted eboard before AG agrees. sigh i wish it didn’t have to be this hard.
general agreement to trim drivetrain dimensions just to make life easier for everyone.
looking at mounting everything. RM is basically in charge of this? RM+AG i guess. We (I) got an idea of how we would mount a 118 style indexer with a shooter. Anyway any mounting is gonna be somewhat complex and interconnected. No more “you mount intake i’ll mount shooter” and it works out independently, that type of stuff that we’re used to.
At this point we still haven’t decided between different indexers. and it’s getting pretty late, after all full cad deadline is literally tomorrow.
after dinner I continue to look at design with RM. no idea what he’s doing, he theoretically plans on “doing some random stuff and throwing the rest at RS”. LOL well we all know how that would turn out. anyway still don’t know what he’s doing but whatever.
btw for future we need to cad in crayola cad first. then gradually turn it into a real cad. refer to nasa rdc rap for more info.
RS leaves i’m lowk kinda tilted cuz idfk what he’s been doing. I ask and he tells me he finished spindexer. I take a look (it looks like something I could cad in an hour. anyway.) anyway. I take a look on how it fits on the real robot. After some thinking (wow also this looks quite like MI’s drawing).
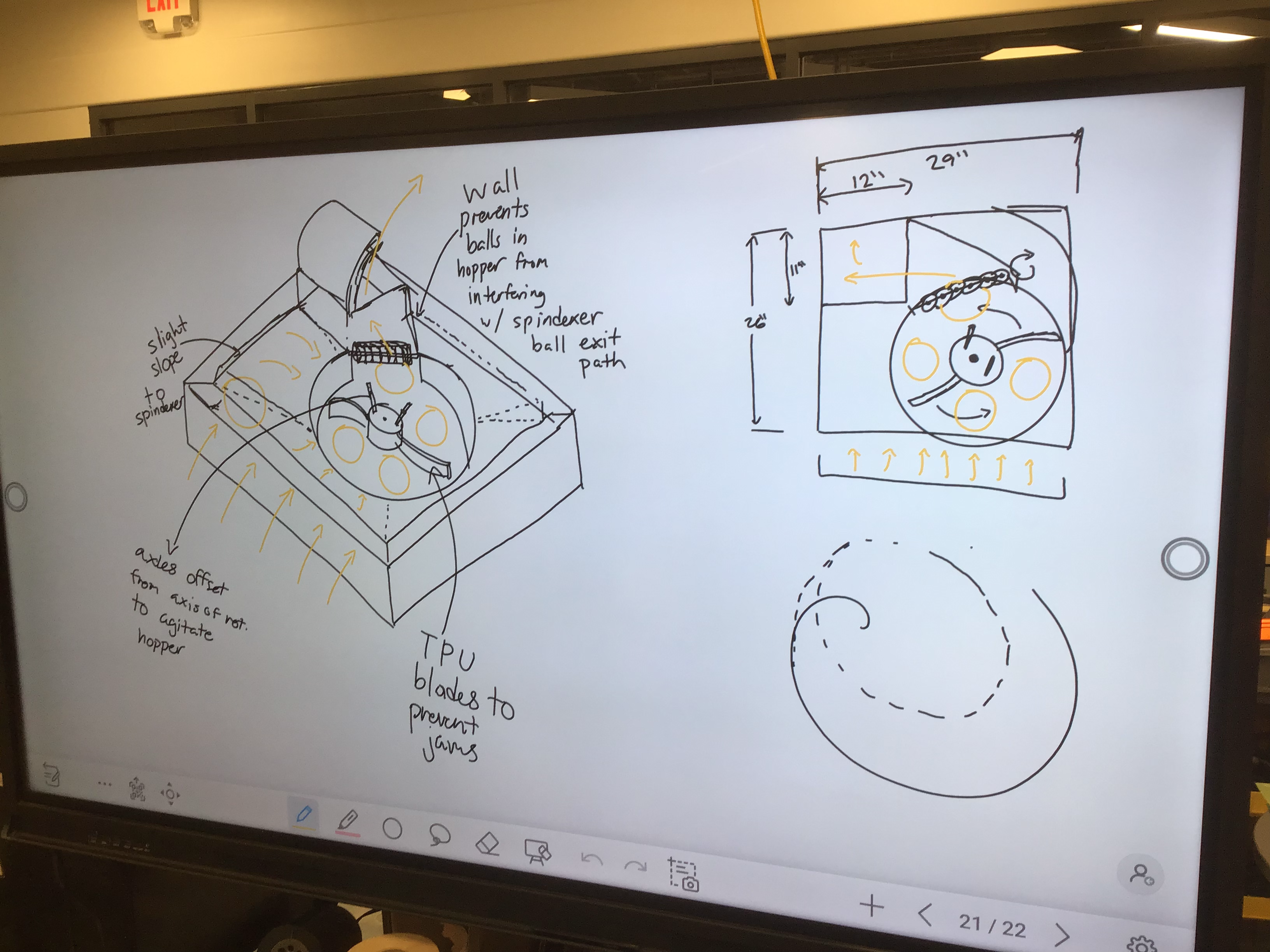
MI’s drawing from thursday. looks like this is what we’re going with, roughly
I call over AG and KC and we make the very fast decision that a) this looks right and b) this is what we’re going with, because literally anything else is going to take too long to verify. KL agrees and that we can prototype this fast.
AG tries to convince me to go oval spindexer again (no. I already told like 5 separate people no 5 times each). anyway we decide to just go with walls around, probably, at least for now (unless we have extra prototyping time).
anyway. the final design decisions (except maybe for climb??? I’m still pretty adamant on no L2/L3 but it looks like we might have space for it…) have been made, which is nice. As long as we stick to deadlines I think it can get done? maybe I’m getting too optimistic again but it is full steam ahead for now.
tomorrow: cad, roughly done. spindexer, exact, prototyped. shooter, exact, first build. drivetrain code, done. If we can get all of this i’d be pretty happy to continue with this design and progress.
jason, signing off. it’ll be a long day tomorrow.
oh and some stuff I want need to do outside of robotics:
- do some usaco
- actually continue thinking abt math
- learn some physics
- teamscode